飞艇是一种依靠浮升气体提供静升力、依靠推进系统和控制系统实现操纵飞行,轻于空气的浮空器。
飞艇的总体布局、飞行机理和工作模式显著不同于飞机、导弹、卫星等飞行器。
近年来,美国、英国、德国、俄罗斯、瑞士、韩国与中国等国都积极开展飞艇研制工作。
高空飞艇
高空飞艇(high altitude airship,HAA)又称为平流层平台系统(Stratospheric Platform System,SPS),其任务目标是长期驻留在美国海岸地区上空,用于区域预警和国土防御,如图1.5所示。
图1.5 HAA项目示意图
2002年10月,美国导弹防御局(Missile Defense Agency,MDA)启动HAA项目。2003年9月,MDA与洛克希德•马丁公司(简称洛马公司)签订合同,开始第一阶段项目研究。2004年11月,美国国防部批准项目研究进入第二阶段,开始研制原型艇并进行演示验证。2005年6月,洛马公司开始为期四年的第三阶段项目研究,研制长131m、直径45.74m的原型艇,预定飞行高度为18.3km,驻空时间为1个月。
2008年初,HAA由MDA转入美国陆军空间与导弹防御司令部/陆军战略司令部(USASMDC/ARSTRAT)。2009年4月,USASMDC/ARSTRAT委托洛马公司研制HAA的试验艇HALE-D。2011年7月27日,HALE-D飞艇在俄亥俄州(Ohio)阿克伦城(Akron)进行了首次飞行试验。
HAA概念设计方案如图1.6所示,采用椭球旋转体外形,艇体内置氦气囊和空气囊,用于浮力与压力控制;艇体两侧各安装两台电动螺旋桨作为推进装置;艇体上表面铺敷薄膜太阳能电池阵列,用于提供电能;艇上搭载雷达、红外传感器和通信设备等有效载荷。
HALE-D是HAA的试验艇,艇体由流线型旋成体艇囊和“X”型充气尾翼组成,如图1.7所示。艇体内置氦气囊和空气囊,用于浮力与压力控制,艇体表面采用热控涂层技术缓解辐射受热问题。

图1.6 HAA概念设计

图1.7 HALE-D飞艇
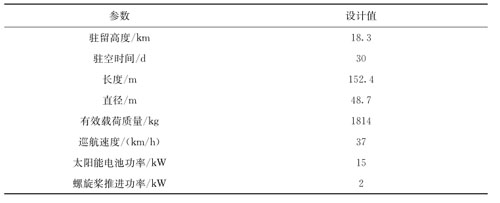
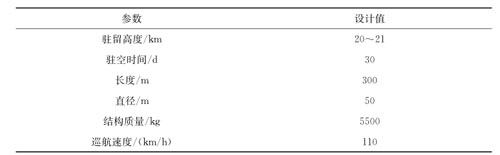
HAA的主要设计参数见表1.1。
表1.1 HAA主要设计参数
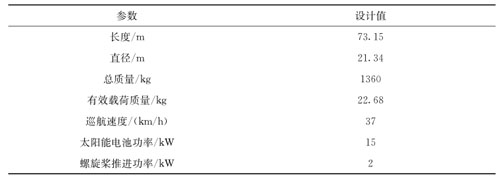
HALE-D的主要设计参数见表1.2。
表1.2 HALE-D主要设计参数
2011年7月27日早上5:47,HALE-D从位于美国俄亥俄州阿克伦城的Airdock基地放飞,升至9.75km高度时因净浮力不足导致无法上升,随后终止飞行试验,通过释放氦气降落,平均下降速度为6.1m/s,上午8:26降落在宾西法尼亚州(Pennsylvania)西南部的格林郡(Greene)。此次试验虽然没有实现预定目标,但验证了飞行控制、通信链路、推进系统、能源系统等部分关键技术。HALE-D飞行试验情况如图1.8所示。

(a)出库

(b)放飞

(c)升空

(d)降落
图1.8 HALE-D飞行试验
高空哨兵飞艇
高空哨兵飞艇(HiSentinel)是复合艇体高空动力平台(composite hull high altitude powered platform,CHHAPP)项目计划的一部分,其目标是开发用于战术通信、对地观测和侦察监视的平流层飞艇平台。HiSentinel飞艇由美国西南研究院(SouthwestResearch Institute,SWRI)、美国Aerostar公司和空军研究实验室(Air force Research Laboratory,AFRL)联合研制。HiSentinel系列飞艇包括HiSentinel-20、HiSentinel-50和HiSentinel-80,如图1.9所示。

(a)HiSentinel-20

(b)HiSentinel-50

(c)HiSentinel-80
图1.9 HiSentinel系列飞艇
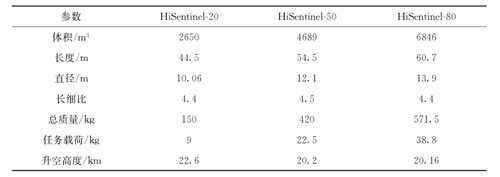
HiSentinel的主要设计参数如表1.3所示。
表1.3 HiSentinel主要设计参数
2005年11月8日, HiSentinel-20成功完成飞行试验,此次试验携带约27kg有效载荷,飞行高度为22km,飞行时间为5h。HiSentinel-20采用类似高空气球的方案,放飞时为半成形,上升过程中自由膨胀成形。2008年6月,HiSentinel-50在新墨西哥州进行了首次飞行试验(见图1.10),上升至20km高度后由于艇囊内外压差超过阈值导致囊体破裂,随后降落至地面。

图1.10 HiSentinel-50 飞行试验
2010年11月10日,HiSentinel-80完成首次飞行试验,此次试验目的是获取HiSentinel-80的性能参数以及测试有效载荷的工作性能。HiSentinel-80在20km高度短暂滞空8h,但是因飞行控制故障处于自由飘飞状态,下降过程中因氦气阀故障导致无法顺利降落。
传感器结构一体化飞艇
美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)于2004年启动传感器结构一体化飞艇项目(Integrated Sensor Is Structure, ISIS),其目标是研制一种将轻型相控阵雷达传感器集成于艇体结构的平流层飞艇(如图1.11所示),实现对地面和空中目标的持续监视。2009年4月28日,DARPA与洛马公司签订合同,开始研制ISIS原型艇。
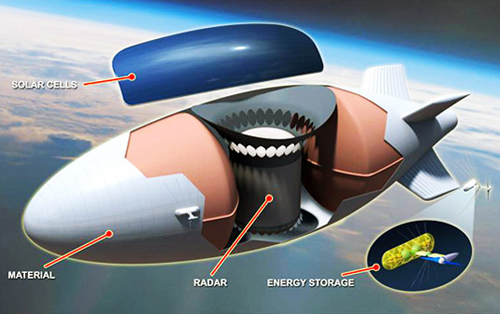
图1.11 ISIS飞艇概念设计图
ISIS同样采用椭球旋转体外形,艇体内置氦气囊和空气囊;艇体表面集成6000m2的超大孔径有源相控阵雷达,用于跟踪空中与地面移动目标。ISIS的主要设计参数见表1.4。
表1.4 ISIS主要设计参数
按照DARPA的研究计划,ISIS项目分为三个发展阶段:第一阶段(2004~2005年)为可行性论证阶段,主要开展系统可行性研究,包括系统设计、需求分析和传感器设计;第二阶段(2006~2008年)为系统研究与技术开发阶段,主要研究系统关键技术,包括低面密度囊体材料、轻质低功率密度雷达阵列、超低功率发射/接收模块设计;第三阶段(2009~2013年)为缩比艇演示验证阶段,开展缩比艇的制造、系统集成和演示验证试验。目前,尚无关于ISIS飞艇演示验证试验的公开报道。
“攀登者”飞艇
“攀登者”飞艇(Ascender)是美国空军空间作战实验室和空间作战中心所提出的临近空间机动飞行器(near space mobile vehicle,NSMV)项目的原型艇,2003年初由JP航宇公司开始研制,2003年9月完成。“攀登者”飞艇外形呈“V”字形(如图1.12所示),长53m,宽30m,装有两台螺旋桨推进器,由燃料电池提供能源。

图1.12 攀登者飞艇
2003年11月,未携带任何任务载荷的“攀登者”飞艇被释放至30km高空进行初期验证试验,并成功返回地面。此外,JP航宇公司还为“攀登者”飞艇进行了配载试验,携带45kg的通信设备和成像设备,上升至平流层高度,完成了地面操作指令反应以及巡航、驻留和降落等飞行试验任务。
平流层卫星(Stratellite)
平流层卫星(Stratellite)是美国Sanswire公司提出的一种用于通信和实时监视的平流层飞艇,如图1.13所示。2005年3月12日,美国Sanswire公司展示了其研制的Stratellite样机,该样机长57m,体积是目标艇的三分之一。2005年5月9日,Sanswire公司成功完成了Stratellite样机的浮空试验。2005年7月,Sanswire公司同欧洲、中东、非洲的一些国家达成合资协议,在上述国家部署无线通信平流层飞艇平台。

图1.13 Stratellite飞艇
平流层卫星的预定飞行高度为19~21km,留空时间为6个月;采用太阳能电池提供能源,依靠螺旋桨推进器实现低速机动;可携带多种任务载荷,如用于因特网、高清数字电视、图像传播以及其它通信网络的仪器设备,以实现通信中继。Sanswire公司计划将多个平流层卫星组成一个大规模的中继站网络,以覆盖美国全境,为军事应用和国家安全防务提供