雪球App,作者: 慧博,(https://xueqiu.com/3966435964/274452748)
作者:慧博智能投研
作为机器人新型末端执行器,灵巧手是机器人研究的重要课题,近年来国内外研究进展加速。自20世纪70年代起,国内外就对灵巧手展开了大量研究,从三指到五指,从工业到生活,从简单的抓取到灵巧操作,市场相关主体对于灵巧手的研究不断推进,以期解决越来越复杂的实际作业问题。
近年来,海外具有代表性的灵巧手厂商包括SCHUNK、Shadow Robot、qb Robotics、Clone Robotics等;国内包括蓝胖子机器智能(dorabot)、因时机器人、腾讯Robotics X实验室等也陆续公布灵巧手领域的相关产品和研究成果。随着人形机器人产业化的加速,国内外对灵巧手领域的研究也呈现出加速趋势。
以下我们就将以灵巧手为研究对象,对灵巧手产业相关问题展开具体分析。灵巧手产业当前市场现状如何?在实际研发中有哪些方向和难点?当前市场的核心矛盾是什么?相关市场主体有哪些性能实现方案?及以特斯拉灵巧手为例,采取了什么样的技术路线?在了解这些问题的基础上,我们还将对灵巧手的核心部位、产业相关企业进行梳理,以进一步把握产业发展关键及技术现状。同时,还将基于上述过往经验历程、现实状况,对整个灵巧手产业的未来发展方向进行合理的梳理分析,以期帮助大家加深对灵巧手产业的认知,更好的了解产业全貌。
01
行业概况
1、相关概念:灵巧手是机器人的新型末端执行器,在运控交互中起关键作用
灵巧手是机器人的一种新型末端执行器。一般而言,机器人与环境交互的方式主要包括:移动行走、视觉等信息的获取、决策的执行输出。末端执行器(End Effector)是机器人执行部件的统称,一般安装于机器人腕部的末端,是直接执行任务的装置。末端执行器作为机器人与环境相互作用的最后环节与执行部件,对提高机器人的柔性和易用性有着极为重要的作用,其性能的优劣在很大程度上决定了整个机器人的工作性能。
灵巧手以人手的结构和功能为模仿对象,在机器人与环境的交互中起着关键作用。“灵巧”指的是手的姿势可变性,这种可变性越高,则认为手就越灵巧。机器人灵巧手从结构和功能上参考人手,能够灵活操作对象,实现对物体的灵活抓取,满足多种工作需求。多指灵巧手最普遍的手指数目为3-5个,各手指具有3个关节,手指关节的运动副都是采用转动副。
两指夹持器:是抓持物体进而操控物体的装置,模仿的是手指的夹持运动。它能够在执行某些动作的同时夹住和松开目标物体。应用于机器人的末端夹持器一般采用电机或气缸作为驱动,机构原理以多连杆机构和气缸为主。例如德SCHUNK公司的气动平行爪夹持器、FESTO公司的气动夹持器、亚德客手指气缸等。
多指抓持手:一般为三指或者四指抓持手,主要包括联动型抓持手、多关节手指抓持手、软体多指抓持手等,其基本原理与两指夹持器一样,由多连杆驱动或气缸驱动实现多指的同步运动。如Righthand Robotics公司的ReFlex TakkTile三指手、苏州钧舵机器人有限公司的均巧三指手、德国SCHUNK公司的3-fingergripper hand SDH等。
多指灵巧手:机构形式是多指多关节,并且最普遍的是手指数目为3~5个,各手指具有3个关节,手指关节的运动副都是采用转动副。灵巧手的主要驱动方式包括4种:液压驱动、电机驱动、气压驱动、形状记忆合金驱动。如日本“电子技术实验室”的Okada灵巧手、美国斯坦福大学研制成功的Stanford /JPL灵巧手、美国麻省理工学院和犹他大学联合研制的Utah/MIT灵巧手等。

2、发展历程:从三指到五指,传感功能升级
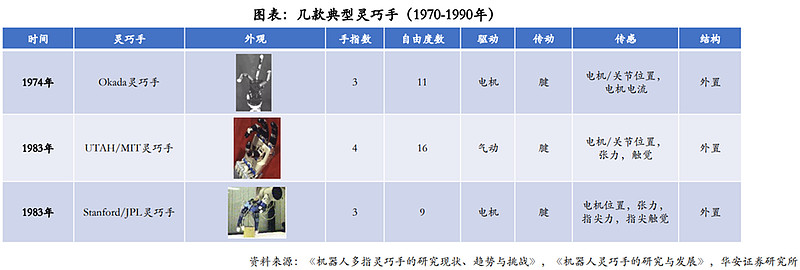
灵巧手起始阶段:1962年的Belgrade手被认为是世界上最早的灵巧手。1974年日本的Okada灵巧手是早期灵巧手的典型代表,它有3根手指,拇指有3个自由度,另外两根手指各有4个自由度,采用电机驱动和肌腱传动方式。
20世纪80年代:20世纪80年代是灵巧手发展的一个里程碑,取得了许多成果,产生了具备了位置、力/力矩等基本传感功能的现代灵巧手。1983年美国的Stanford/JPL灵巧手有3个手指,每指有3个自由度,采用12个直流伺服电机作为关节驱动器,采用N+1型腱驱动系统传递运动和动力。Utah/ MIT 灵巧手有4个手指,每个手指有4个自由度,共16个自由度,采用2N型腱驱动系统传递运动和动力。
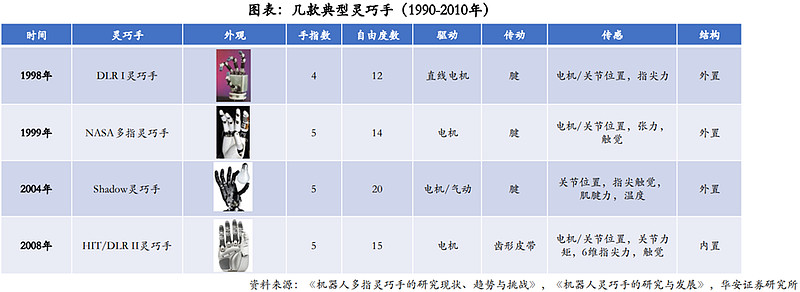
20世纪90年代:随着嵌入式硬件的发展,多指灵巧手的研究向着高系统集成度和丰富的感知能力提升的方向发展。20世纪90年代研制的典型灵巧手有DLRI灵巧手和NASA多指灵巧手,这些灵巧手在构型方面有所提高,能够根据抓取操作的需要进行灵巧手构型,感知能力也更加丰富。
21世纪初:21世纪初研制的典型灵巧手有Shadow灵巧手和HIT/DLRII灵巧手,系统的集成度、机电一体化程度有很大的提高,能够更加准确地完成一些人手的基本功能。
3、传动方式:绳驱VS连杆
常见的灵巧手传动方式有腱绳传动、连杆传动、齿轮传动、带传动,其中腱绳传动是目前应用最广泛的方案。
连杆传动:早期的多指灵巧手的手指内多采用连杆等传动结构,多个连杆串并联混合的使用形式较为常见。手指的运动和动力由刚性连杆传递,能够抓取大型的物体且结构设计紧凑,可以完成包络抓取。然后,连杆传动在远距离的控制上就比较困难,容易发生弹射,抓取的空间较小,同时尺寸和质量大,运动不灵活等问题难以解决,因此更灵活、更省空间的腱绳传动方案应运而生。
腱绳传动:腱绳传动是目前灵巧手研究中应用最为广泛的一种传动方式,如目前量产的Shadows Hand即采用了这一传动方式。腱绳在一定程度上模拟了人手的肌腱结构,腱绳传动使得大型的驱动器远离了执行机构,减轻末端的负载和惯量,提升了抓取的速度,灵活性大大提升。同时腱绳适用于空间狭小且需要驱动自由度数目较多的传动场合,较连杆等传动方式更节省空间。然而腱绳传动也有其应用难点,包括负载能力较弱,预紧力变化大,负载越大效率越低等。
4、市场空间:人形机器人赋予灵巧手千亿级市场规模
灵巧手作为机器人执行末端,是人形机器人必不可少的部件,根据因时机器人网上报价,单只灵巧手价格约为 5 万元,如果未来人形机器人销量到达百万台,对应灵巧手市场规模将达到 1000 亿元。需要注意的是,未来人形机器人可能会应用到各种场景,对应的灵巧手配置各不相同,预计单价也会有较大的差别。
02
市场现状
1、国产灵巧手有较大的价格优势
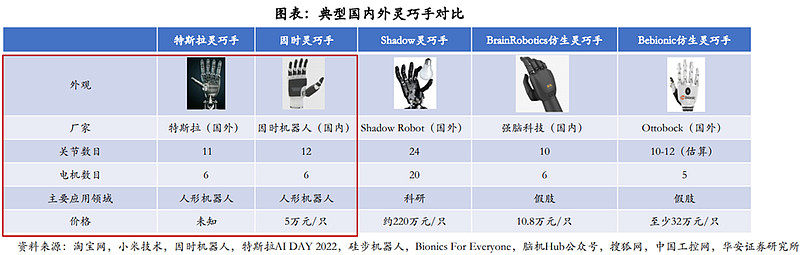
国外灵巧手的价格及应用领域:灵巧手技术壁垒较高,目前国外一些灵巧手技术先进,但是设计难度大,零部件多,所以价格很高,一般用于科研领域,如Shadow灵巧手报价约220万元/只。用于假肢领域的仿生灵巧手灵活程度稍差一些,但价格也相对较低,如德国的Bebionic仿生灵巧手价格至少32万元/只。
国内灵巧手的价格优势:灵巧手的国内生产商有因时机器人、浙江强脑科技、思灵机器人、蓝胖子机器智能等。其中浙江强脑科技的BrainRobotics仿生灵巧手应用领域是假肢行业,标准版价格是10.8万元/只。因时机器人是国内商业级五指灵巧手的龙头企业,因时灵巧手与特斯拉灵巧手有着类似的关节数和相同的电机数目,现在价格为5万元/只。后续国内灵巧手生产商将有望凭借降本优势进入特斯拉这样的人形机器人本体生产商的供应链。
2、国内灵巧手可实现灵活抓取
人手的抓取操作:人手的运动涉及相当高的灵活性水平,能做出各种各样的动作,适用于执行各种需要抓握力的任务。人手有十三种基本功能,其中抓取操作有勾拉、侧捏、动态操作、球形抓握、球形指尖握、柱状抓握、二指尖捏和多指尖捏八种。
因时灵巧手可实现灵活抓取:虽然国外灵巧手在性能上高于国内灵巧手,例如Shadow灵巧手比因时灵巧手关节