腿是在低重力环境下运动的理想选择。由于有限的功率和复杂的地表环境,使用车轮将是困难的。腿可以用来跳跃,需要大范围越障时将是有效的。地球上的机器人可以通过跳跃动作来重新定位,但是对于月球/火星机器人则是一个挑战。
无论如何,SpaceBok有解决控制问题的能力,并能有效地重新定位自己。它还可以很容易地进行翻转着陆,这在像地球那样的1g的重力环境下是很难实现。
SpaceBok的特点
作为深空探测器的重要组成部分,腿式机器人在复杂地形上的运动已经突破并广泛应用。但是SpaceBok是一种先进的机器人,它通过腿部运动强化了移动的自主学习能力。虽然由于重力变化,在小行星上着陆一直很艰难,但受到猫跳跃和降落的启发,SpaceBok成功地从大自然中获得了着陆行星表面的灵感。
以下是SpaceBok的一些突出的特点,使它在众多空间机器人中脱颖而出:
机器人的敏捷性增强了其快速适应新环境的能力,从而可以不慌不忙地开始工作。SpaceBok使用强化学习技术来执行一组基于运动的任务。机器人仅用腿就能有效地跟踪投掷目标。在四足机器人的形态下,它模仿猫一样的跳跃技术,学习在着陆前翻转。机器人的盲目性不会对定位和适应不平坦的地形造成任何障碍。在翻转着陆后,SpaceBok甚至可以跳回所需的方向。由于每条腿上都有两个关节,SpaceBok可以重新定向。机器人的腿关节使其动作更快更流畅。软着陆是一个显著的特征,这是使用关节带来的优势。机器人的先进特性为复杂情况和问题的快速恢复提供了必要的能力保证。SpaceBok在地球的地面模拟试验上已经验证了所有这些功能,它可以使用腿部功能从一面墙跳到另一面墙。这证明了SpaceBok本身的先进性,以及它如何能成为在低重力环境下探测月球/火星等天体的有效工具。

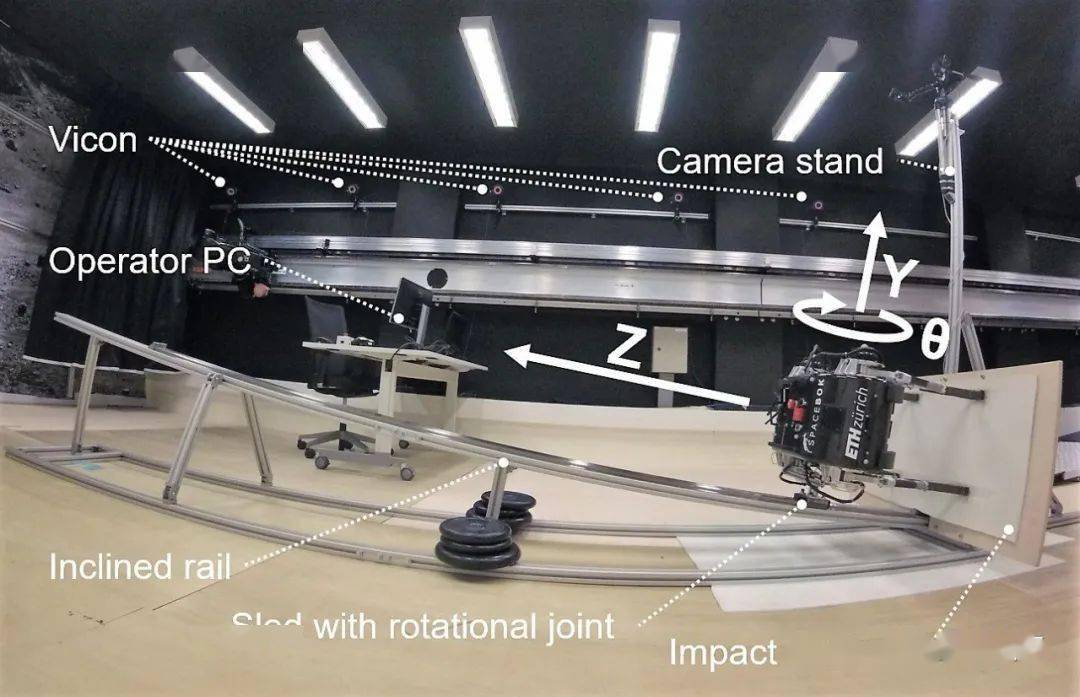
SpaceBox的地面跳跃式模拟试验
开发SpaceBok面临的挑战
就像其他任何技术发展一样,SpaceBok在追求跳跃及行走性能的过程中也面临一系列挑战。相对于地面运动而言,深空探测面临的主要挑战是长期飞行阶段。在地球上,高重力让机器人很容易保持平衡。它们跳跃时不需要重新定位。而在低重力环境(月球1/6g)中,机器人必须学会在空中保持平衡。
另一个挑战是如何处理重力的变化。重力的变化会给机器人的运动带来问题,因为机器人必须在不同重力环境中自我调整和重新定位。重力越小,平衡移动就越困难,重力越大,翻转等任务就越困难。需要在最短的时间内调整到改变重力的整个过程对SpaceBok来说是一个挑战。
像猫一样进行仿生设计
当你深入观察大自然时,你会看到一个持续运转的“实验室”,它一直在努力开发它的标本。多年来,大自然想出了解决问题的办法,这对各物种的进化大有帮助。这些行为的优雅仅仅代表了感知自然生态形式的重要性。
与此同时,科技也在从大自然中汲取灵感而不断发展。虽然进化是数十亿年来自然解决问题的结果,但技术在解决每一个问题时都需要一个重大的飞跃。随着近年来深空探测技术的发展,空间机器人的设计也以自然仿生为基础。
扑翼微型飞行器的灵感来自于蜜蜂的扑翼,这些机器人通常会成群工作,模仿蚂蚁、蜜蜂或白蚁的群体。仿生机器蛇被设计成蛇的形状,使它在陆地和水中具有同等的力量。同样,蝙蝠机器人是一种受蝙蝠启发的机器人。它的设计目的是在研究蝙蝠如何飞行的同时,构建高效和安全的空中机器人。
在成功设计出空中和水上机器人后,研发人员想要开发地下。挖洞机器人的设计是柔软和快速的一流技术,以最低限度地侵入其地下运动。
视频3:像猫一样进行仿生设计
最后的感想
在过去,许多空间机器人都因为工作机制上的天地不一致性而失败。虽然有些在着陆地外天体表面后没有启动,但大多数在着陆过程中就启动了。有了SpaceBok,深空探测被视为有了新的希望。从大自然中学习,穿越一个新的领域,这将是一个令人兴奋的冒险,这个机器人将在崎岖地形上进行平稳移动到跳跃和翻转,这个空间机器人是为探索地外天体复杂表面的全新体验而开发的,等待着人类尚未目睹的奇迹。(全文完)
——————————————————————————————————
空间机器人专题往期