本发明涉及一种可重构模块化机器人机电对接接口,属于机器人以及特种机电互连。
背景技术:
1、可重构模块化机器人由于其具有极强的环境适应性和多任务适应能力,在空间建造、外行星探测、军事和医疗等领域具有极强的应用价值。面向不同任务需求,可重构模块化机器人能够按照执行任务或工作环境的不同自主或人为地改变多个模块单元的组合构型,机电对接接口作为可重构模块化机器人各模块单元间机械、通讯和电源的传输载体,其功能和性能直接影响整机的任务执行能力和效率,也是可重构模块化机器人能否广泛应用的基础。
2、现有的可重构模块化机器人机电对接接口在通用性、容差性、稳定性和对接效率等方面较差,难以满足复杂环境下可重构模块化机器人快速稳定构型变换的需求。如在机械接口方面,磁连接等连接方式稳定性和对接精度差、负载能力小;在电控接口方面,现有接口传输数量受限、容错性较差;在对接锁紧结构方面,现有锁紧方式连接与断开速度慢、稳定性较差。为此,设计具有高精度、高稳定、大负载、大容差、高集成、易断开和连接功能的可重构模块化机器人机电对接接口具有重要的实际应用价值。
技术实现思路
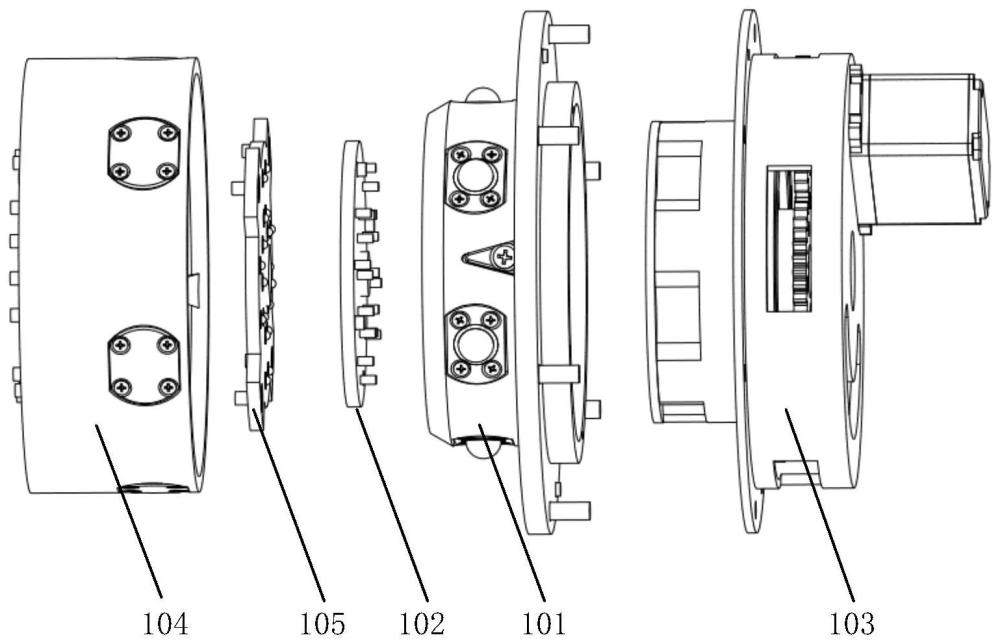
1、本发明提供一种可重构模块化机器人机电对接接口,属于机器人技术领域以及特种机电互连技术领域。其包括公端对接接口和母端对接接口两部分,其中公端对接接口包括公端机械对接模块、公端电路对接模块及锁紧模块,母端对接接口包括母端机械对接模块、母端电路对接模块;公端对接接口与母端对接接口可通过视觉引导对接和机械结构引导对接2种方式结合,完成接口的对接过程,可通过锁紧模块实现接口的锁紧及解锁,最终实现模块化机器人的机电互连过程;
2、为达到上述目的,本发明采用以下解决方案:
3、本发明提供一种公端机械对接模块,其包括公端接口座、公端锁紧球钢套、锁紧钢珠和接口导向销,其中,公端接口座为一体化加工结构,整体为中空的圆柱形凸台形状,凸台顶部加工有内嵌的凹槽状电路模块安装座,外圆柱面上加工有六个对称分布的公端锁紧球钢套安装孔,有两个接口导向销安装凹槽;
4、本发明提供一种公端电路对接模块,其包括公端电路板、公端电源传输通道、公端信号传输通道和视觉传感器,模块整体为圆盘形状,通过内部四个沉头安装孔固定在公端接口座的电路模块安装座上;
5、本发明提供一种锁紧模块,其包括锁紧杆、锁紧杆挡圈、超薄壁交叉滚子轴承、轴承外挡圈、轴承内挡圈、锁紧舵机、舵机固定端盖、舵机输出端齿轮和锁紧杆齿轮,其中,锁紧杆通过超薄壁交叉滚子轴承、轴承外挡圈及轴承内挡圈同轴固定在所述公端接口座内部,舵机固定端盖同轴安装在公端接口座底部,锁紧舵机安装在舵机固定端盖底面,舵机输出端齿轮固定安装在锁紧舵机的输出端,锁紧杆齿轮同轴固定在锁紧杆底部,舵机输出端齿轮与锁紧杆齿轮相互啮合,锁紧杆挡圈同轴固定在锁紧杆顶部;
6、本发明提供一种母端机械对接模块,其包括母端接口座和母端锁紧球钢套,其中,母端接口座为圆筒形状,底部加工有凹槽状的电路模块安装座,侧面加工有六个对称分布的母端锁紧球钢套安装孔;
7、本发明提供一种母端电路对接模块,其包括母端电路板、母端电源传输通道、母端信号传输通道和视觉定位靶标,模块整体为带四个吊耳的圆盘形状,通过四个吊耳安装在母端接口座的电路模块安装座上。
8、本发明提供一种可重构模块化机器人机电对接接口的对接及分离过程的工作原理及流程,包括:
9、步骤s1:当所述接口需要实现对接时,所述公端对接接口向所述母端对接接口主动靠近,公端电路模块上的视觉传感器对母端电路模块上的视觉定位靶标进行识别,并将信号反馈至控制器用于调整公端对接接口位姿;
10、步骤s2:所述公端对接接口的公端接口座顶部外壁加工有大容差倒角,所述母端对接接口的母端接口座顶部内壁同样加工有大容差倒角,当公端对接接口顶部与母端对接接口顶部接触时,通过两者之间的倒角进行对接引导;
11、步骤s3:当公端对接接口进入到母端对接接口一定距离后,公端对接接口上的接口导向销进入到母端对接接口上的接口导向槽,实现公端对接接口与母端对接接口的周向定位及约束;
12、步骤s4:当公端对接接口上的公端电路对接模块与母端对接接口上的母端电路对接模块有效接触时,公端电路对接模块上的公端电源及信号传输通道与母端电路对接模块上的母端电源及信号传输通道建立连接,公端电路对接模块给控制器传输对接到位信号,控制器下达锁紧指令驱动锁紧模块,实现公端对接接口和母端对接接口的锁紧过程,完成接口对接工作;
13、步骤s5:当所述接口需要实现分离时,控制器下达解锁指令驱动锁紧模块,实现公端对接接口和母端对接接口的解锁过程,公端对接接口离开母端对接接口,完成接口分离工作。
14、本发明提供一种可重构模块化机器人机电对接接口的锁紧过程及解锁过程,其工作原理包括:
15、当所述接口需要锁紧时,锁紧模块接收到控制器锁紧指令后,驱动锁紧舵机上的舵机输出端齿轮旋转运动一定角度,舵机输出端齿轮带动锁紧杆齿轮进行旋转运动,进而带动锁紧杆转动,锁紧杆顶端外沿加工有六个均匀分布的弧形凹槽,初始位置时弧形凹槽正对公端锁紧球钢套轴心,每个公端锁紧球钢套内含一个锁紧钢珠,锁紧钢珠一部分在公端锁紧钢套内部,一部分位于锁紧杆弧形凹槽内,当锁紧杆转动一定角度时,锁紧钢珠被顶出弧形凹槽,使得锁紧钢珠一部分在公端锁紧钢套内部,一部分进入母端对接接口的母端锁紧钢套内部,实现锁紧过程;
16、当所述接口需要解锁时,锁紧模块接收到控制器解锁指令后,控制器控制锁紧舵机反向旋转,使得锁紧杆顶部的弧形凹槽正对公端锁紧球钢套轴心,锁紧钢珠能够离开母端锁紧球钢套,重新进入锁紧杆弧形凹槽内,实现解锁过程。
技术特征:
1.一种可重构模块化机器人机电对接接口,其特征在于,所述接口包括:
2.根据权利要求1所述的一种可重构模块化机器人机电对接接口,其特征在于,所述接口的对接及分离过程的工作原理及流程,包括:
3.根据权利要求2所述的锁紧过程及解锁过程,其工作原理包括:
技术总结本申请提供一种可重构模块化机器人机电对接接口,属于机器人技术领域以及特种机电互连技术领域。其包括公端对接接口和母端对接接口两部分,其中公端对接接口包括公端机械对接模块、公端电路对接模块及锁紧模块,母端对接接口包括母端机械对接模块、母端电路对接模块;公端对接接口与母端对接,接口可通过视觉引导对接和机械结构引导对接2种方式结合,完成接口的自主对接过程,可通过锁紧模块实现接口的锁紧及解锁过程,最终实现模块化机器人的机电互连。技术研发人员:陈钢,宋雄俊,孙汉旭,安小康,康峰博,白天宇,岳天乐,李彤受保护的技术使用者:北京邮电大学技术研发日:技术公布日:2024/6/23