编辑:LRS
【新智元导读】没有任何地形能挡住M4,机器人的运动模式从未如此丰富!为了让机器人可以跨越各种地形,波士顿动力开发出了人形机器人和机器狗,以其超高的关节自由度,彻底摆脱了轮式机器人的地形限制。

最近,加州理工学院、喷气推进实验室和美国东北大学联合研发了一款多运动模式、移动可变形机器人(Multi-Modal Mobility Morphobot,简称M4),用变形的方式改进了轮式机器人的地形可穿越性。

M4重约6千克,推力约9kg,轮子直径约30厘米,机身搭载底层控制和数据收集的机载计算机,传感器(编码器,惯性测量单元,立体相机)、用于远程操作的通信设备、关节执行器、推进电机、电力电子设备和电池。
这个看似平平无奇的小车可以实现八种运动姿态:飞行、滚动、爬行、下蹲、平衡、翻滚、侦查、局部操作。
比如需要飞行的时候,轮子可以直接变成无人机的螺旋桨起飞,无视任何陆地复杂地形。
甚至还能把小车变为行走状态,可以更方便地观察障碍物,并使用两个轮子继续前进,并实现爬坡、翻滚等,最大可以穿越45度的陡坡。

不过目前的行走状态还只是初代版本,仍然受限于轮式机器人的运动能力,未来M4还会考虑改进以穿越非连续的破碎地形。
除了强大的机械能力外,研究人员还给M4配备了人工智能系统和各种传感器,可以在复杂环境中进行自主导航决策,并已在加州理工学院内的户外场景完成了导航测试。
机器人运动上的灵活性,再加上人工智能技术辅助,使得M4可以根据前方地形选择最有效的运动形式。
比如使用M4探索陌生环境时,可以先用四个轮子沿着地面前进,这也是最节能的模式;当前方出现类似巨石这样的障碍物时,M4可以用两个轮子站起来,从上方观察前方地面路况,假如是峡谷或者其他轮式机器人无法穿越的地貌,就可以将轮子变为螺旋桨直接飞过去。
M4的应用场景非常广泛,可以将伤员无障碍地送往医院、数字农业、开展搜索行动等,比如下面的例子中,M4可以在倒塌的建筑中进行外部部署,然后利用高机动性迅速抵达和降落在常规机器人(纯轮式或无人机等)无法进入的地带。
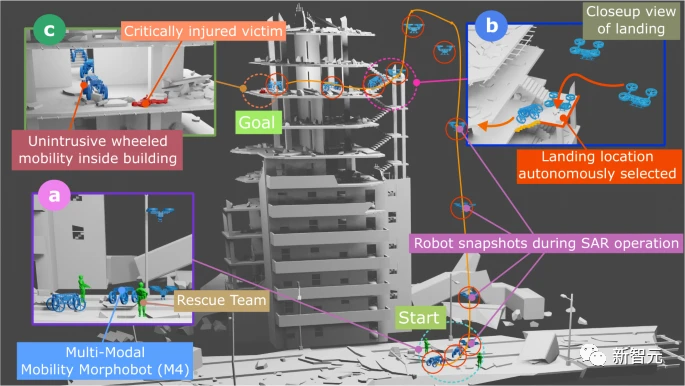
甚至在未来的星际时代,还可以帮助人类在其他未知星球上进行探索。
相关论文已发表在Nature Communications上。
论文